Fusing information from an ensemble of noisy data streams in a scalable, flexible and robust way is critical to many multi-robot systems operating in uncertain dynamic environments, especially for applications such as collaborative mapping for exploration, target search/tracking for surveillance, and futuristic unmanned urban transport systems. In those systems, the communication between networked robots can be highly variable due to time-varying environmental factors, which makes it brittle and infeasible for any centralized data fusion method that depends on the full connectivity of the communication graph. As a sequel, effective distributed data fusion methods should possess guaranteed performance for ad-hoc and arbitrarily connected networks, which provide scalability for fusion agents to join and drop off the network, flexibility to allow agents to join at any point, and robustness to ensure connectivity of the network even when there are multiple failures of links or agents.
A Distributed Bayesian Data Fusion Algorithm with Uniform Consistency
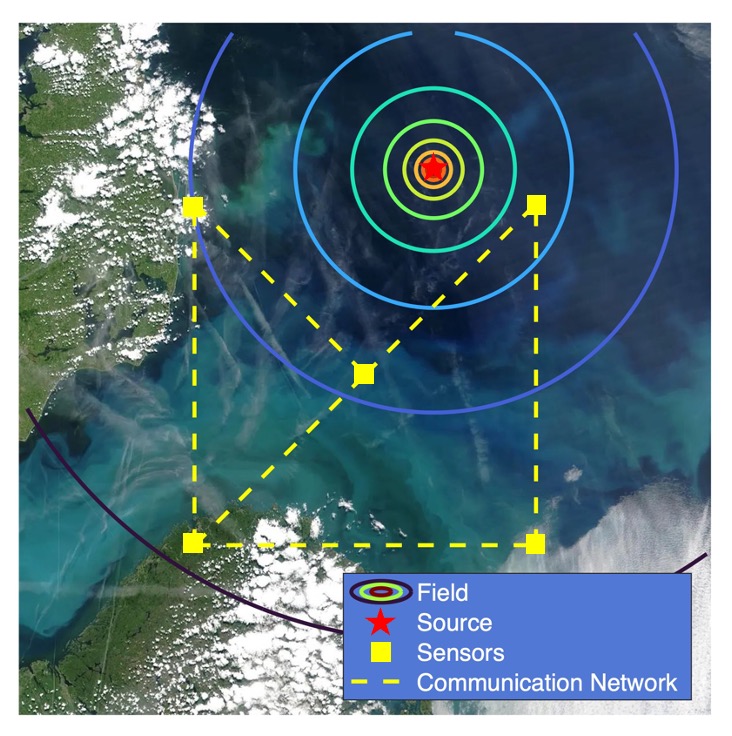
Proposed a novel Bayesian distributed data fusion (DDF) algorithm, which ensures uniform consistency, i.e., all the locally estimated distributions converge to the true distribution, for arbitrary periodically connected communication graphs.
Cognition Difference-based Dynamic Trust Network for Distributed Bayesian Data Fusion
Proposed a cognition difference-based mechanism to construct a dynamic trust network for real-time DDF, where the cognition difference is defined as the statistical difference between the sensors’ estimated probability distributions.