As robots continue to find applications in a wide range of real-world scenarios, the next wave of technological progress in the field of robotics appears to be centered around their “trustworthiness” to interact effectively with complex and uncertain environments and execute tasks autonomously with minimal human intervention.
But what exactly does it mean for a robot to be trustworthy? From my perspective, a fundamental set of criteria, encapsulated in the “3R principle”, can outline the essential attributes:
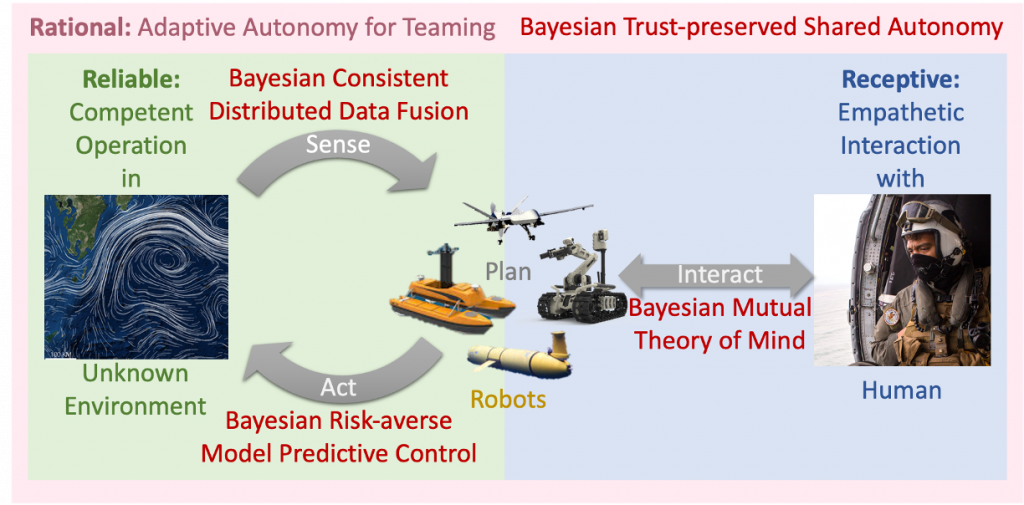
- Reliable: Competent Operation in Unknown Environment
- Receptive: Empathetic Interaction with Human
- Rational: Adaptive Autonomy for Human-robot Teaming
Numerous researchers have tried to approach these challenges from diverse viewpoints, yet in my view, the greatest obstacle impeding the practical application of robots in real-world settings is uncertainty. Factors such as noisy observations, dynamic environmental conditions, ambiguous human instructions, and evolving human-robot team structures render any deterministic approaches fragile over extended real-world operations. This leads me to a fundamental question: Can we establish the trustworthiness of robots through a probabilistic lens?
This inquiry serves as the driving force behind my research, which aims to pave the way to trustworthy robots with Bayesian learning. Allowing for the accumulation of evidence and the refinement of beliefs with newly collected data, Bayesian learning provides a principled yet flexible framework for robots to address a variety of uncertainties encountered when they navigate in unknown, unstructured, and dynamic environments, especially with the presence of human partners. As such, my research centers on seamlessly incorporating Bayesian learning into diverse robotic techniques and applications to develop both theoretically interpretable and practically feasible algorithms, culminating in a distinctive yet harmonious framework that advances the development of trustworthy robots in real-world scenarios.