Integrated Task and Motion Planning for Process-aware Source Seeking
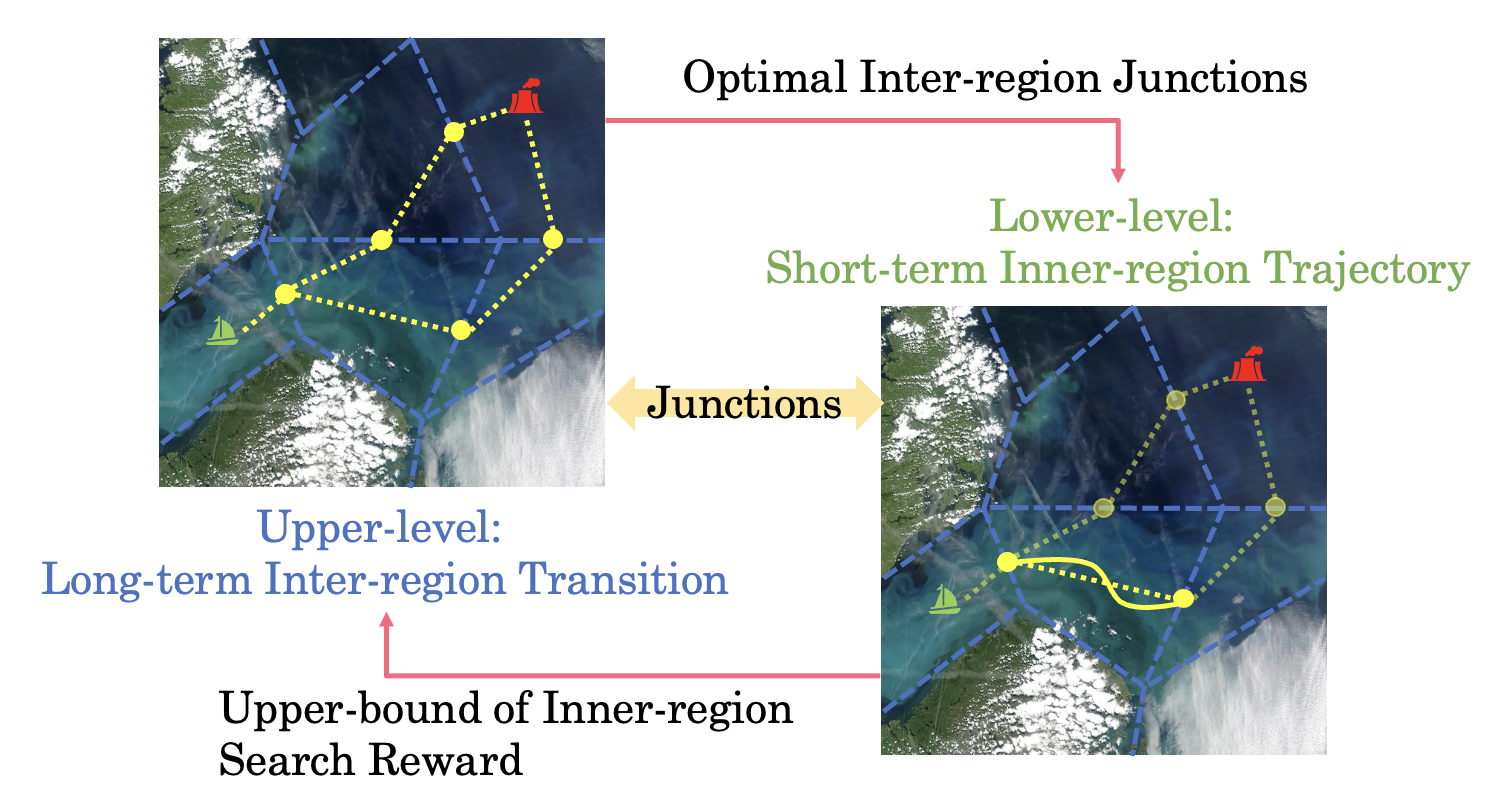
Formulated the process-aware source seeking (PASS) problem as a task and motion planning (TAMP) problem and proposed a bi-level hierarchical planning framework to decouple the planning of inter-region transition and inner-region trajectory by introducing inter-region junctions.
Bayesian Learning Model Predictive Control for Process-aware Source Seeking
Proposed a Bayesian learning based MPC approach to solve the process-aware source seeking (PASS) problem, which combines the objectives of optimal search and source seeking and aims to utilize the exploration and detection information to guide the process of source seeking.