Risk-Aware Model Predictive Control Enabled by Bayesian Learning
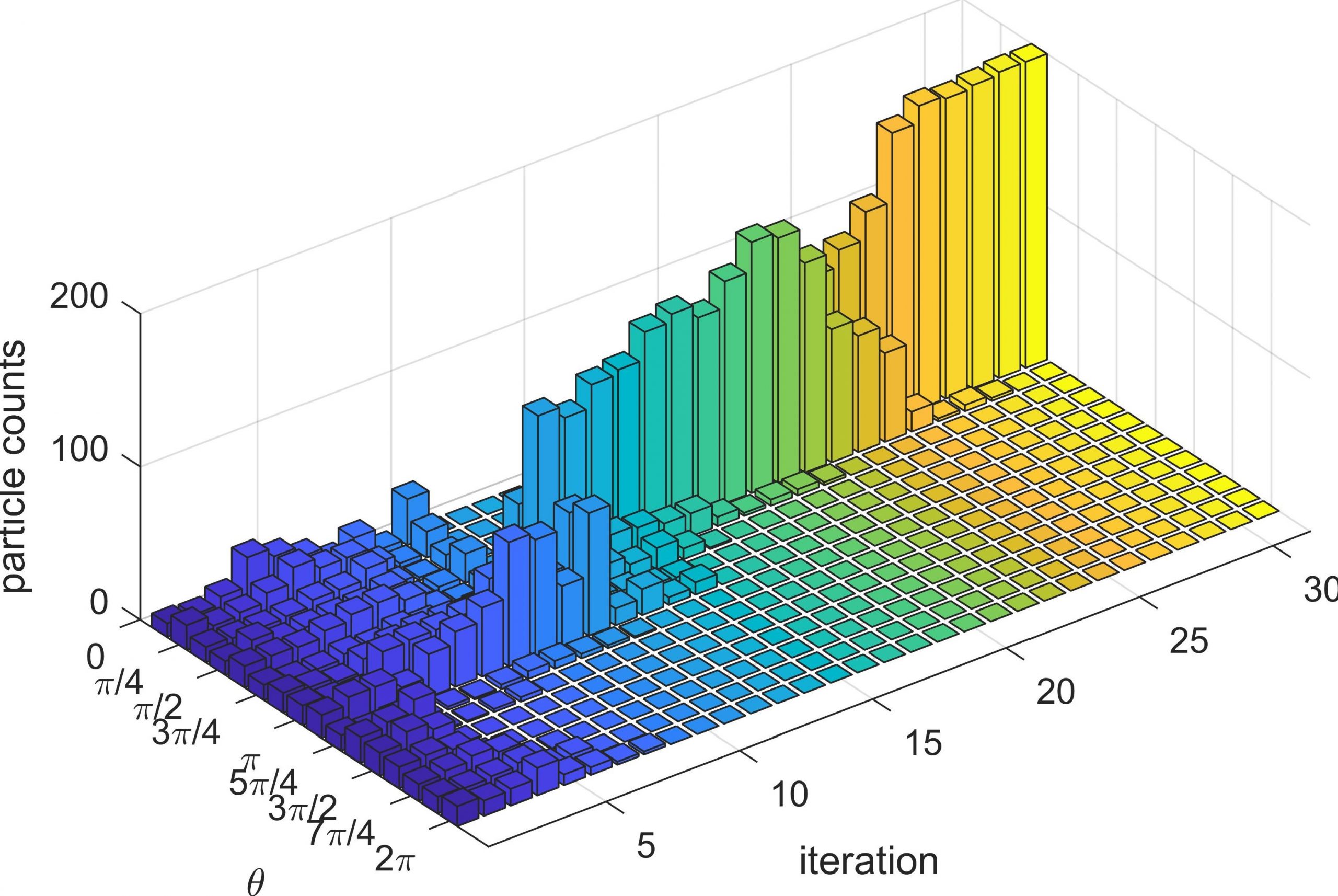
Proposed a risk-averse Model Predictive Control (MPC) framework, which estimates the underlying parameter distribution using online Bayesian learning and derived a risk-averse control policy by reformulating classical MPC problems as Bayesian risk optimization (BRO) problems.
Bayesian Risk-averse Model Predictive Control with Consistency and Stability Guarantees
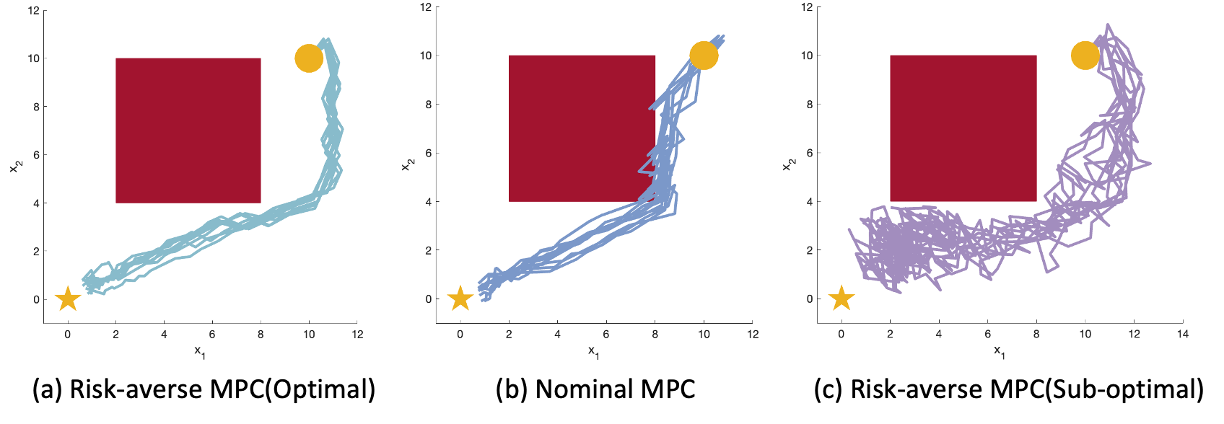
Proposed a pragmatic Bayesian risk-averse MPC algorithm to captivate computationally tractable implementation with theoretical guarantees of consistency and stability.